Section: New Results
Visual Tracking of Multiple Persons
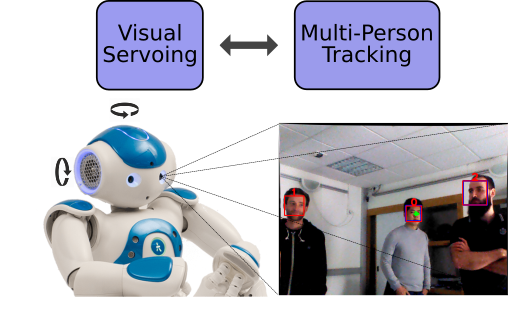
Object tracking is an ubiquitous problem in computer vision with many applications in human-machine and human-robot interaction, augmented reality, driving assistance, surveillance, etc. Although thoroughly investigated, tracking multiple persons remains a challenging and an open problem. In this work, an online variational Bayesian model for multiple-person tracking is proposed. This yields a variational expectation-maximization (VEM) algorithm. The computational efficiency of the proposed method is made possible thanks to closed-form expressions for both the posterior distributions of the latent variables and for the estimation of the model parameters. A stochastic process that handles person birth and person death enables the tracker to handle a varying number of persons over long periods of time [4]. The method was combined with visual servoing and implemented on our robot platform (Fig. 3) [38].
Websites:
https://team.inria.fr/perception/research/ovbt/
https://team.inria.fr/perception/research/mot-servoing/
|